Ops Manager Learn 4: Turn a Corner
3. Plan of Action
The table below summarizes this plan of action using pseudocode.
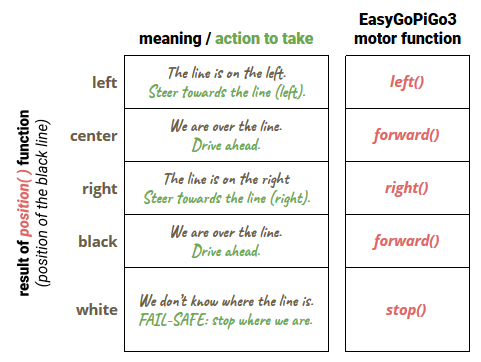
In previous missions we have used if statements. These are great for performing one of two possible actions based on the answer to a simple yes/no question e.g. “did I hear a bell?”.
In our plan of action we want our robot to take one of a number of actions based on what the position() function tells us; left, right, drive forward or stop. To do this we will need to extend the if...else construct.