Instructions
5. Sensing Obstacles
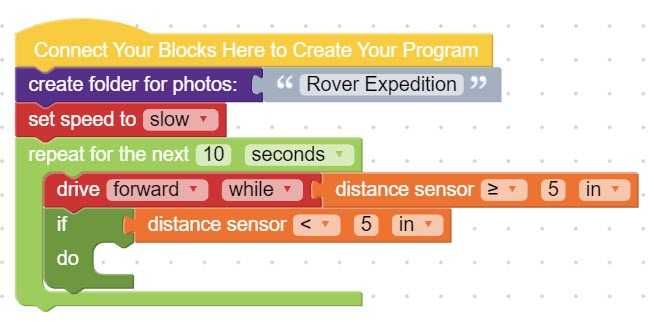
Now, you are going to program the robot to make decisions based on the distance sensor readings. Add onto your program to create the program shown below. You will need blocks from:
- Loops
- GoPiGo
- Sensors
- Logic
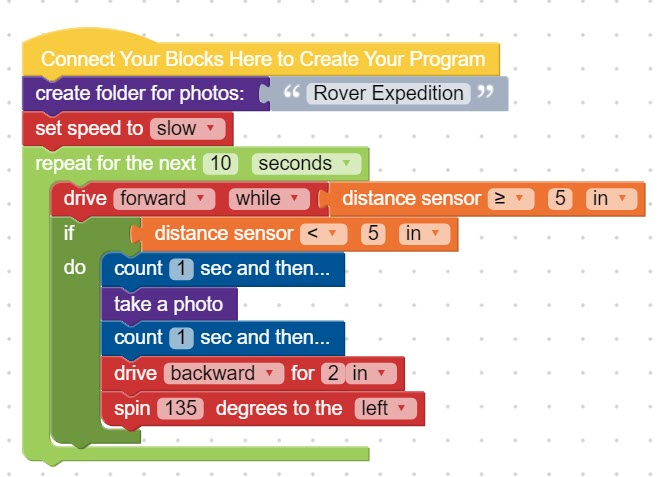
Add blocks to the do- portion of the code to tell the GoPiGo what to do when it encounters an obstacle.
- Do you want it to stop and take a picture?
- Turn around ?
- Back up?
It is up to you! An example program is pictured below.