Instructions
7. Obstacle Avoidance, continued
Now, connect blocks next to “do” to tell the GoPiGo what to do if the parameters are met.
Do you want the GoPiGo rover to stop? To turn around? Drive backwards?
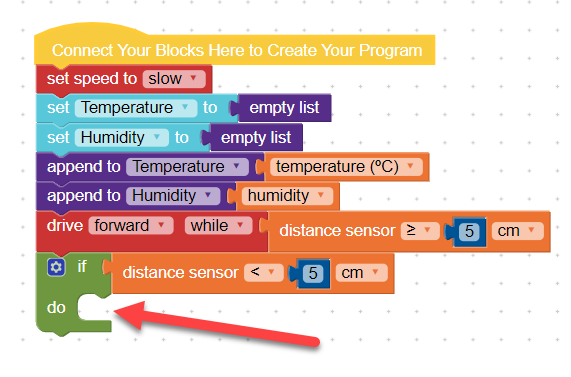
Here is an example:
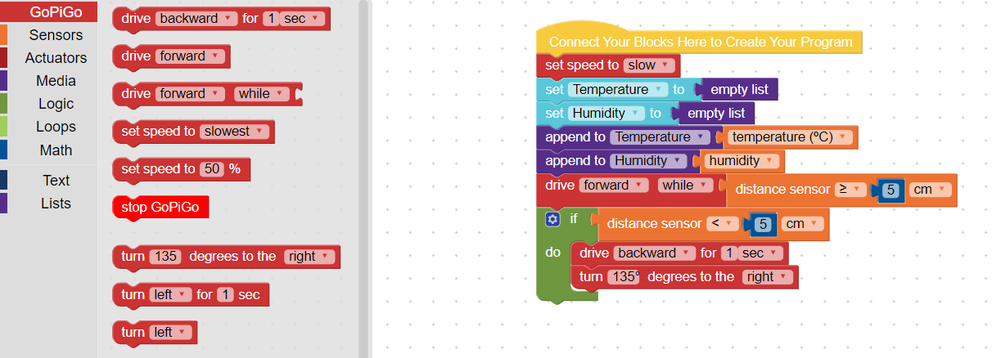
Now, connect blocks next to “do” to tell the GoPiGo what to do if the parameters are met.
Do you want the GoPiGo rover to stop? To turn around? Drive backwards?
Here is an example: