02 Mission Instructions
3. Build

The GoPiGo has more than one port for attaching input and output devices, and although the cords on all these devices fit into all the connectors, the sensors will not work if plugged into the wrong port.
Begin by plugging the distance sensor into one of the two I2C ports on your GoPiGo.
Now think carefully about where and how you attach the sensor to the robot.
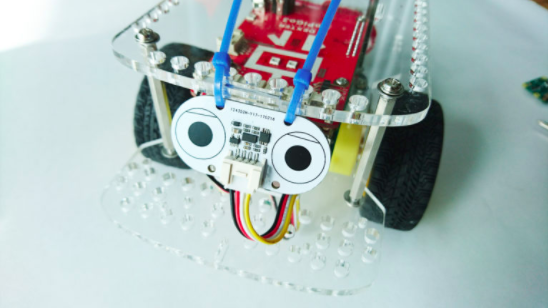
The distance sensor works by sending light out to bounce off of obstacles. If your sensor is pointed at the ceiling, the floor, or behind the robot, your robot will notice obstacles in those directions, but that might not be the most helpful information for the human you’re trying to help.
Finally, build and attach your harness to your GoPiGo.
Test your harness using one of your earlier programs to make the GoPiGo move forwards or using the controls under 'Drive'.
Make sure that your harness is not in the way of the wheels and does not block the sensor.