02 Mission Instructions
1. Problem
Service animals have been helping people since the Middle Ages (1). Some dogs are trained to help humans walk safely through new places, to open and close doors, deliver messages, retrieve specific items, or even to warn people of an oncoming medical event.
However, training service animals takes a lot of time and expertise, so getting a service animal is too expensive for some people to access. That is where assistive technology can help. Assistive technology helps millions of people with many different tasks. Some assistive devices help people communicate, move independently from place to place, or pick up and use objects. Some examples of assistive technology include: braille and braille typewriters, closed captioning, voice-controlled lights, and cochlear implants (2).
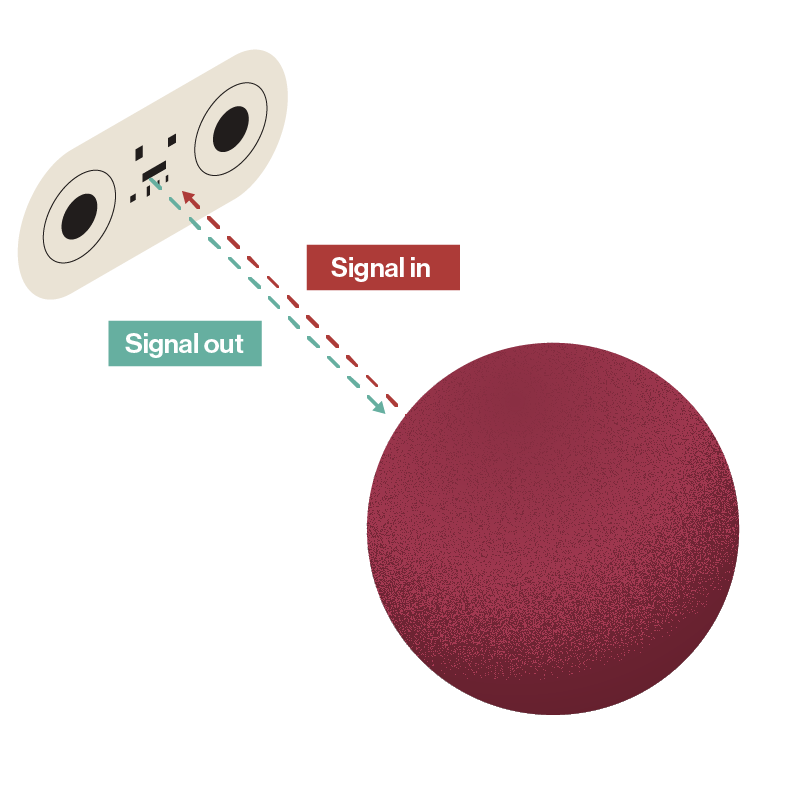
In this mission, you are an engineer tasked with creating a robotic guide dog. Your prototype should be able to lead someone on a pre-planned path around your home without running into walls or obstacles. There are two parts to this challenge: