Instructions
| Site: | GoLabs |
| Course: | Planetary Rover |
| Book: | Instructions |
| Printed by: | Guest user |
| Date: | Thursday, 2 July 2026, 7:17 AM |
Description
Students will investigate current and past space exploration technology. Based on their understanding of space technology, students will design and build a rover to explore a new planet based on their understanding of current and past Mars rover technologies.
1. What do you already know?
Today the class will be learning about exploration of Mars and the technologies that have helped scientists to learn more about the planet.
What do you already know about space exploration technology?
2. Develop a Mission Statement
Your task is to design and build a rover to explore the surface of a newly discovered planet with your team. Your team will be assessing the planet’s visual characteristics, temperature and humidity, and design/implement an experiment to investigate light levels.
Name your rover and create a mission statement to explain what your rover is going to do. Keep in mind the sensors you have access to.
Example: The mission of the Curiosity Rover is “To search areas of Mars for past or present conditions favorable for life, and conditions capable of preserving a record of life” (http://mars.nasa.gov/msl/mission/rover/)
What is the name of your rover? What is your rover's mission statement?
3. Current Mars Rover
Watch the video(s) below about the Mars Curiosity rover mission to Mars. Two additional videos are also linked to show more about what Curiosity has done while exploring Mars.
Next, read about the Mars Curiosity Rover on http://mars.nasa.gov/msl/mission/rover/ with a partner.
What are some of the objectives the scientists wanted to accomplish using the Curiosity rover? What are some of the obstacles they encountered?
4. Sensors and Equipment
Congratulations! Your research team has just landed on planet P-3141 after 5 years of interstellar travel. The safety of this planet to humans is unknown. Before any humans will set foot on the planet, you must first determine the characteristics of the planet. From your workstation, you will launch your GoPiGo a variety of missions into the world around you to gather data about the planet.
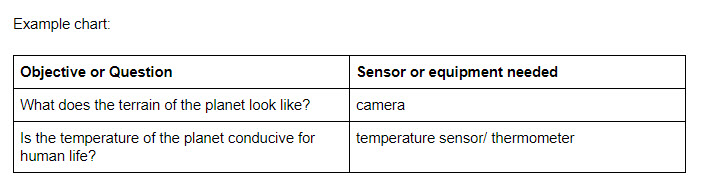
What questions about the new planet do you want your rover to be able to answer? What sensors or equipment will you need to answer those questions?
5. Obstacles
Since you may not be able to see your rover while it explores the planet, it will need an obstacle avoidance system. You will program your rover to use a distance sensor to detect and avoid running into obstacles on the planet.
What obstacles might you encounter on the new planet?
6. Individual Rover Design
On your own, draw and label a diagram of your rover in the box below. Explain what your rover will look like and the function(s) of each part. Your design must include a camera, distance (or ultrasonic) sensor for the first mission. For subsequent missions you rover will use a temperature/humidity/pressure sensor and a light sensor.
7. Team Rover Design
Meet with your group and share your ideas for the construction of your rover. Decide as a group what your rover will look like and where/how all of the sensors will be mounted. Be sure to include a camera and distance sensor (or ultrasonic sensor). You will also need a temperature/humidity/pressure sensor and light sensor for later missions.
Draw out a final design for your team rover on a piece of paper.
8. Build Your Rover
Once your group has agreed on a design, construct your rover. Install and mount the distance sensor as well as the camera. Installing the camera will involve some disassembly of the GoPiGo.
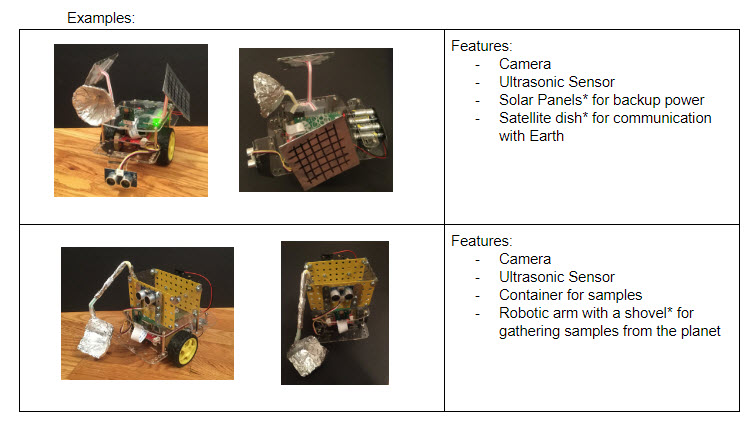
Some of your equipment and sensors may not be functional, but you should be able to explain what they would do if they were real. For example, you may create model solar panels using straws, foil, and cardboard.
Since all three sensors (distance, temperature/humidity/pressure, and light) all use the I2C ports, only two of the three sensors will be plugged in at a time.
9. Test Your Rover
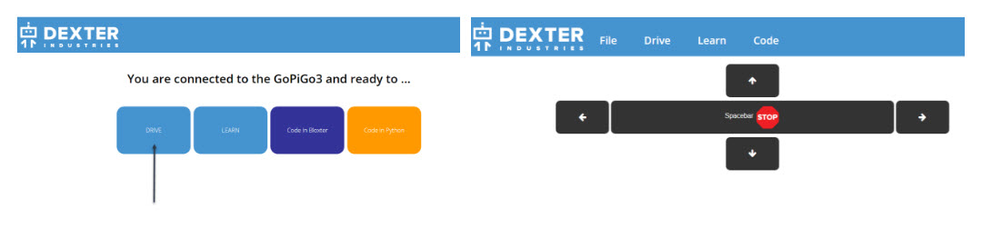
Conduct a basic test to ensure your rover is functioning properly. After connecting to your robot, click Drive to test the robot.
Ensure that your robot can move freely around and that none of the sensors or additional equipment interfere with the rover's movement.
10. Making Connections
Work with your group to answer the following questions.
How could rovers like the one your designed be used on Earth?
Compare and contrast your rover with the Curiosity. Consider things like power source, sensors, size, etc.