Instructions
| Site: | GoLabs |
| Course: | Planetary Rover |
| Book: | Instructions |
| Printed by: | Guest user |
| Date: | Thursday, 2 July 2026, 7:14 AM |
Description
Students will investigate the visual properties of a new planet. Students will record observations and questions based on the data gathered.
1. Introduction
Today you will program your GoPiGo rover to venture out and explore a new planet and take pictures of the planet to learn about geographic features of the surface.
Look at the 360 view of NASA's Curiosity Mars Rover at Namib Dune.
What geographic features do you observe on the planet? What questions do you have about Mars after analyzing the images?
2. Plan Your Program
Before we jump into coding, we are going to break down the larger program into parts and plan it out.
In computer science this is called decomposition. Computer scientists use decomposition to break down a complex task into smaller, more manageable components.
Today’s mission is to explore what the surface of the planet without running into any obstacles and to capture pictures of the planet to investigate the terrain. It is important that your team understands the terrain so that you can plan for upcoming missions.
One key part of the program is the obstacle avoidance since we do not want to damage the rover.
With your team decide how close you want your rover to get to an obstacle and what to do when an obstacle is encountered.
At what distance should the rover react to an obstacle (inches or cm)? What should the rover do if it encounters an obstacle?
3. Distance Sensor
Connect to your robot and click on the Code in Bloxter button. Then, using the drop-down menu for either I2C port on the Sensor Control Panel, select the Distance Sensor.

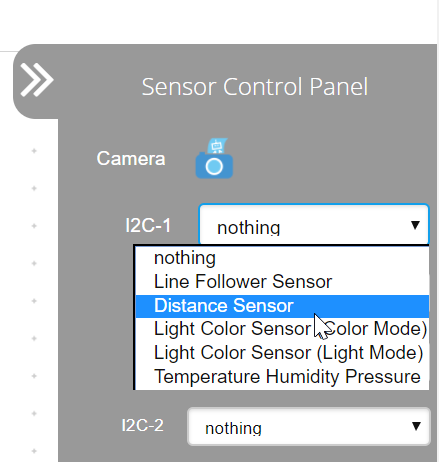
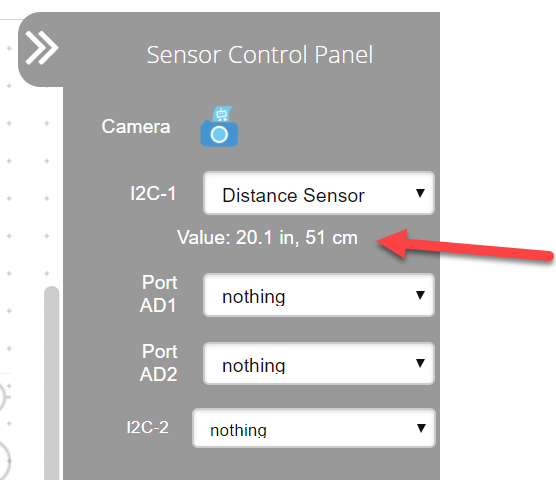
You will see live sensor readings once you select the sensor.
Place your hand in front of the sensor and then move it away slowly. Do you see the sensor readings changing?
4. Safety First!
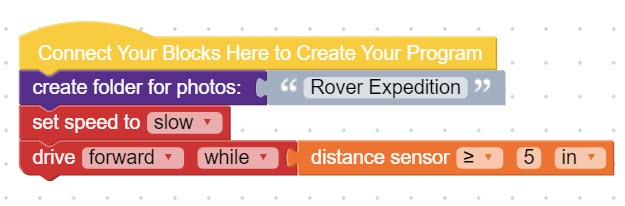
Recreate the program shown below. You will need blocks from:
- Media
- GoPiGo
- Sensors (True or False section)
Explore different values for the distance sensor block. What values keep the GoPiGo safe from obstacles?
5. Sensing Obstacles
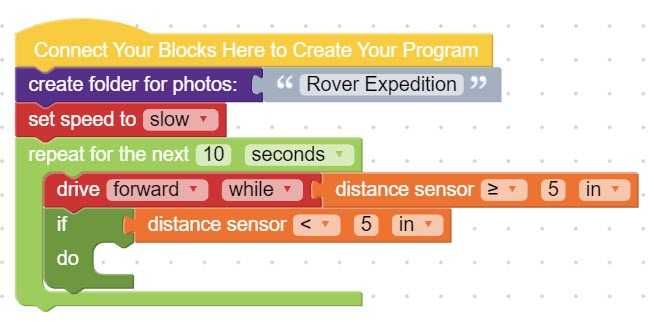
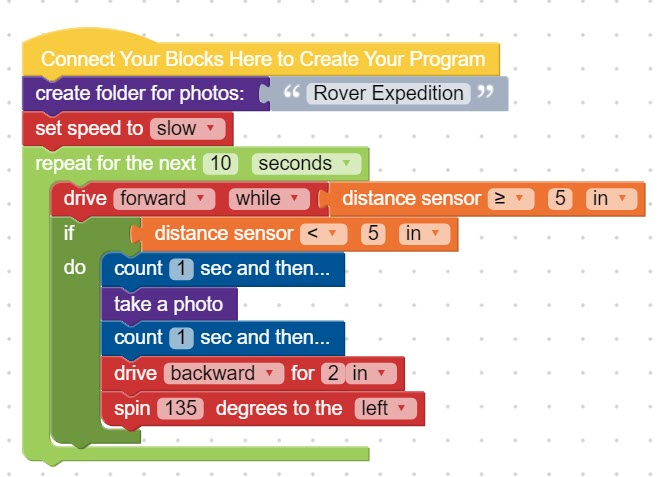
Now, you are going to program the robot to make decisions based on the distance sensor readings. Add onto your program to create the program shown below. You will need blocks from:
- Loops
- GoPiGo
- Sensors
- Logic
Add blocks to the do- portion of the code to tell the GoPiGo what to do when it encounters an obstacle.
- Do you want it to stop and take a picture?
- Turn around ?
- Back up?
It is up to you! An example program is pictured below.
6. Save Your Program
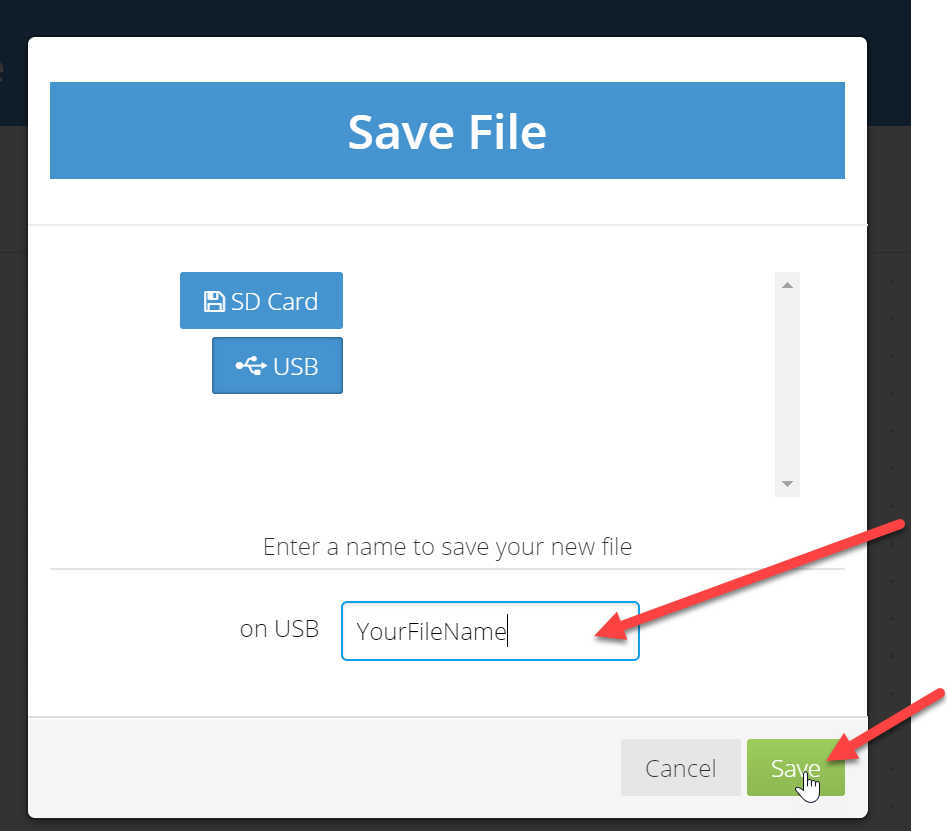
To save your program, click on File --> Save File at the top of the page. You can save the file on the USB flash drive or on the robot's SD card.

Type a name for your program (no spaces) and click Save.
7. Test Your Program
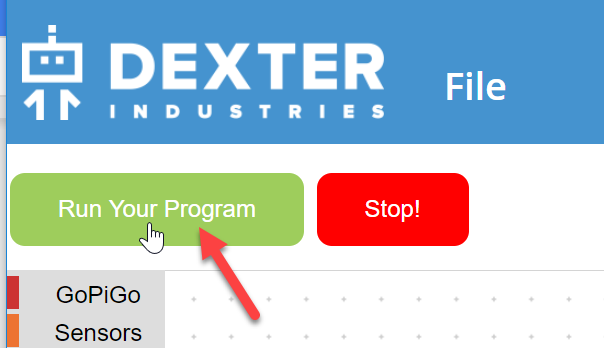
Run your program to ensure that it is working as you intended. Click on the green Run Your Program button at the top of the page to run your program.
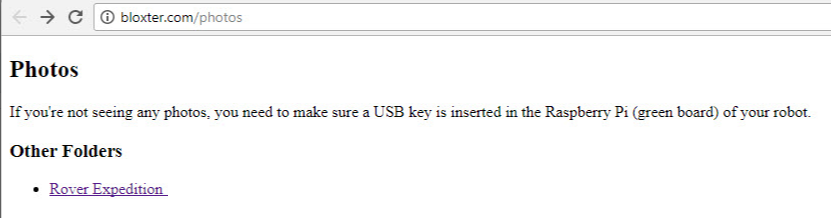
Images from the camera on your GoPiGo rover can be viewed by clicking on the camera icon on the Sensor Control Panel. A new tab will open for you to see the folder(s) with the images. **Check that the USB flash drive is still plugged into your GoPiGo rover. You will not be able to see any pictures if the USB flash drive is not plugged into your robot. **

Does your GoPiGo rover stop in an adequate amount of time to avoid obstacles? Do your images give you a clear picture of the surroundings and obstacles?
Make changes to your program as needed. Be sure to save your program after each change.
8. Explore the Planet & Gather Information
Time to explore! Send your rover onto the planet to gather data about what the planet looks like. Record observations and questions about the geographic features of the terrain (ex. plateaus, mountains, hills, craters, etc). Observations should be strictly features that you can see.
Gather as many photographs of the terrain as you can within the time frame.
9. Join Forces
Confer with another team to share your observations and images. Did you see the same features? Did another team get another view of a feature that you did not see? Do images from another team change any of your observations or inspire any new questions?
Add your new observations and questions to your graphic organizer.
10. Narrow Your Data
Computer scientists use abstraction to help simplify a problem or situation by focusing on what is most important. Think about all of the photos your rover took.
Which 3 photographs are most important for your team to share for future missions to the planet? Why are these photographs most important? What information do they provide to support future missions?
Add the 3 images to your graphic organizer and explain why each image was chosen.
Attach your final graphic organizer to this step when finished.