Extensions
| Site: | GoLabs |
| Course: | Robotic Challenges with Python and GoPiGo |
| Book: | Extensions |
| Printed by: | Guest user |
| Date: | Wednesday, 29 July 2026, 4:17 PM |
Description
This is the first challenge within the Robotics with GoPiGo and Python Curriculum.
Your task was to program your robot to navigate an area of previously unseen terrain to reach its destination, passing through a number of waypoints.
Here are some optional ideas to extend your thinking after finishing the Main Project.1. Extension: Orbit Your Landmarks
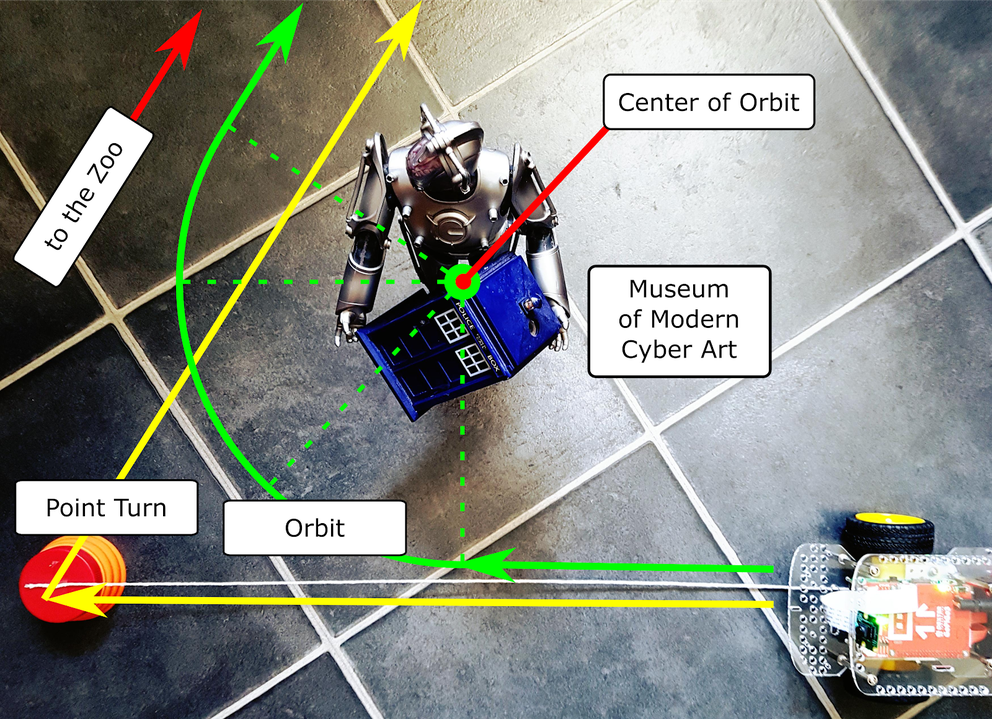
Adjust your navigation code so that instead of driving up to the waypoint and turning on the spot your robot orienteer orbits your landmarks.
HINT:
The orbit( _ ) class library function introduced in the LEARN section will be useful here. You will need to think carefully about where to start your orbit move and how big an orbit you want.
2. Extension: Navigate Your Map in Reverse
Change your code so that your robot orienteer can navigate your map in reverse, starting at the destination waypoint and ending up at the start waypoint.
HINT:
Think about how your forward-navigating directions will need to change when navigating in reverse, both in terms of the order and the measurement values.