Ops Manager: Project
This is the fourth challenge within the Robotics with GoPiGo and Python Curriculum.
Your task is to design a robot program that increases the volume of products that Amazing.com can ship out to its customers on a daily basis without increasing the number of robot pickers it employs.
Learn how to program and calibrate the Line Follower while they try to design an efficient system.
5. Small Hints
Here are a couple of hints to get you started.
- Substitute
picker.position()withpicker.position_val().Instead of simply gettingleftorright, you now get a number telling you how far left, or how far right the robot is from the line. - Investigate using
picker.steer(0,100)orpicker.steer(100,0)instead ofpicker.right()andpicker.left(). - Can you change the
0in thesteer()method to another value to get smoother turns, depending on how far the robot has to correct course? - Look at this table that spells out the different situations. What you need to do is come up with appropriate values for
Sin order to optimize the robot's course.
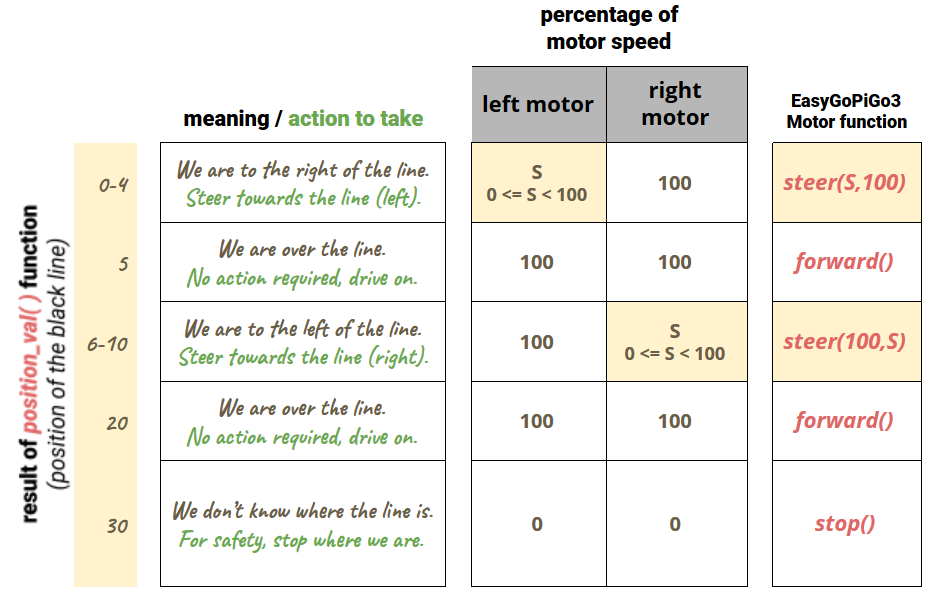
How you calculate that S value is up to you.
When S is equal to 0, you get the bang! bang! controller behavior that you saw in the Learn section.
When S varies according to the distance away from the line, you are now dealing with what's called a proportional controller.