Rescuer: Project
This is the third challenge within the Robotics with GoPiGo and Python Curriculum.
Your task is to design a robot program that can navigate through the maze-like jungle without trampling over any plants or getting stuck in any dead ends.
Learn how to use the Distance Sensor and practice using the left-hand rule of maze-solving.
3. Plan Your Logic
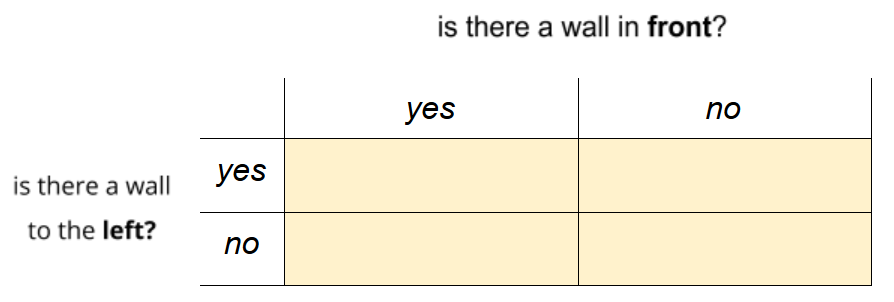
You have front-facing and left-facing distance sensors available to guide your rescuer robot through the maze.
- Draw a truth table like the one below.
- For each empty cell in the truth table below, fill in what action you think your robot should take based on the conditions sensed in front of and to the left of it.
Remember: the only allowable actions are:
- drive forward,
- turn 90 degrees left
- turn 90 degrees right.