Ops Manager Learn 2: Build and Calibrate
This is the fourth challenge within the Robotics with GoPiGo and Python Curriculum.
Your task is to design a robot program that increases the volume of products that Amazing.com can ship out to its customers on a daily basis without increasing the number of robot pickers it employs.
Learn how to program and calibrate the Line Follower while they try to design an efficient system.
9. Calibration: Select the Line Follower
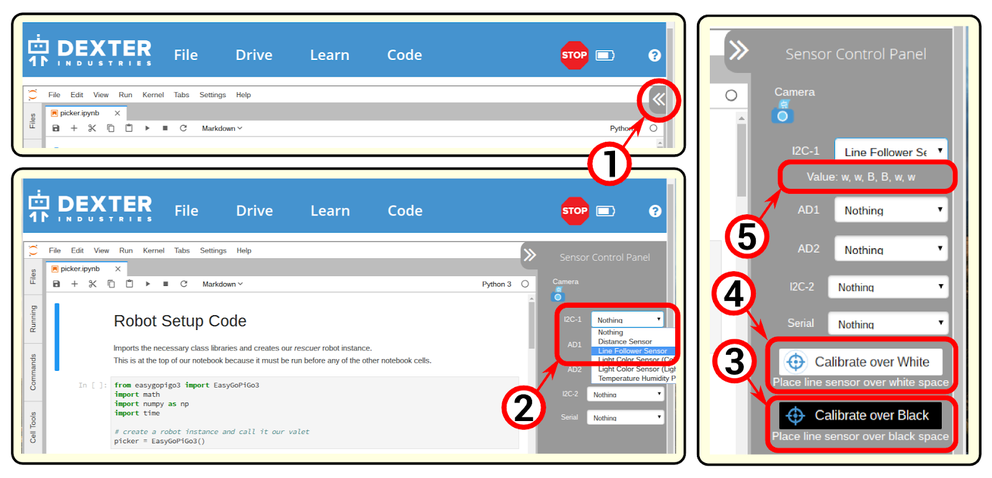
You can calibrate the line follower sensor by opening up the sensor control panel.
- Click on the little arrow top-right.
- Select the line follower in the control panel.
- You will find it either on the I2C-1 pulldown menu, or the IC2-2 pulldown menu. Either one will work.
- Once the sensor is selected, you will see a series of B and W, indicating what the sensor is perceiving. These readings may not be accurate right now because lighting conditions so we have to teach the sensor the notion of black and white.
- Place your GoPiGo over a black line, as seen in the photo above, and press the "Calibrate over Black" button.
- Place your GoPiGo over white paper, and press the "Calibrate over White" button.
- Move the robot over the line, and look at the series of B and W to get a feel of how a line follower works.
You can always use the Sensor Control Panel to get live readings from your sensors.