Ops Manager Learn 4: Turn a Corner

This is the fourth challenge within the Robotics with GoPiGo and Python Curriculum.
Your task is to design a robot program that increases the volume of products that Amazing.com can ship out to its customers on a daily basis without increasing the number of robot pickers it employs.
Learn how to program and calibrate the Line Follower while they try to design an efficient system.
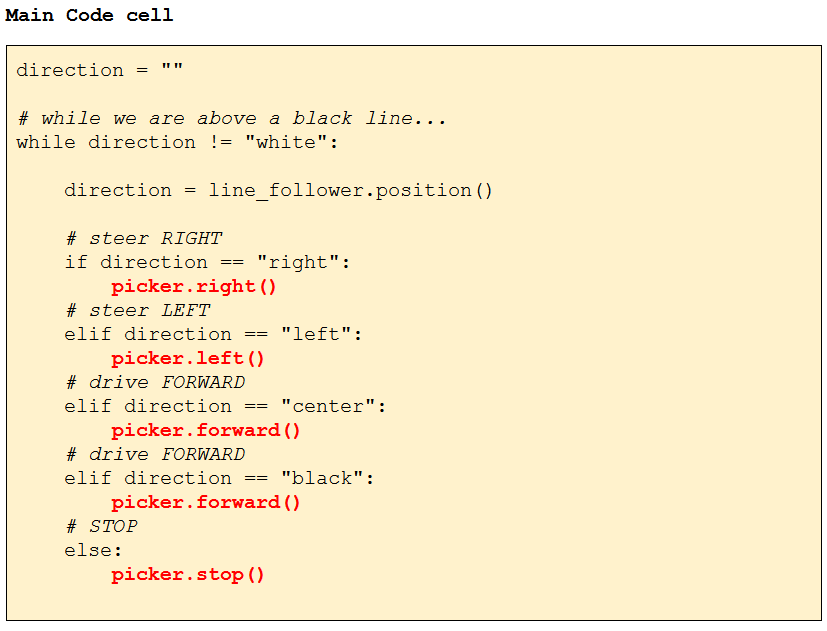
7. Putting It All Together
When everything works as expected, do the following:
- add the relevant motor instructions in your Main Cell code as per the table above.
- remove the print statements (they take time and will reduce the efficiency of your function)
- reduce the sleep time.
- Place the robot at one end of your test track,
- Select the Main Code cell,
- Click on Run Selected Cell.
The robot should now follow the line around the corner.
If it loses the line at any point, the print contrast of your black line may be too low. To fix low contrast problems, try colouring in the line with a black marker pen, re-placing the robot at the start and re-running the code.
The else rule is our fail-safe rule. If it is doing its job as expected, it will stop when it travels beyond the other end of the track.
What do you notice about the way in which the robot follows the line?