Learn 2: Build and Calibrate
This is the fifth challenge within the Robotics with GoPiGo and Python Curriculum.
Your task is to design a robot program to deliver a selection of mail to the residents of GoPiGo Drive, a small cul-de-sac containing 3 houses.
Learn how to how to use and calibrate the color sensor.
2. Attach the Color Sensor
In this mission we will use color to represent addresses. Our courier will identify house addresses by reading color markings on the road.
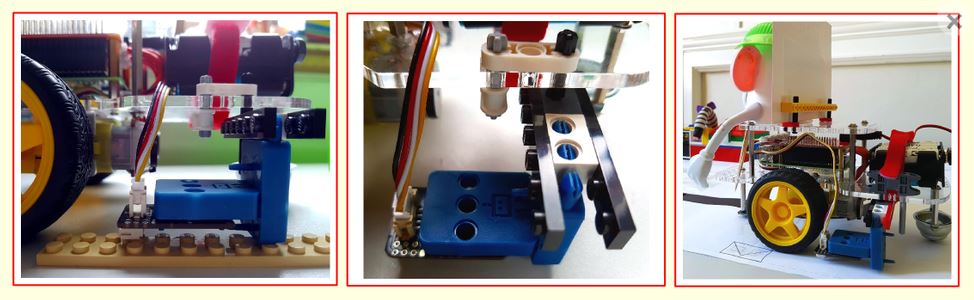
Let’s mount a color sensor :
- on the side of our robot, just behind the wheel and facing the floor,
- with the color sensor less than half an inch (1 cm) off the floor.
- Using the supplied connection cable, connect the sensor up to an I2C port on the front of the robot.
You will need to come up with a method of mounting the sensor that works for you. A combination of sensor mounts and LEGO blocks is good for this. However, you can also make one with craft materials if you prefer. We’ve provided images of a LEGO-based example below to give you an idea.