03 Mission Instructions
Your mission is to develop a robot that mimics how an animal responds to light in its environment.
For additional Biomimcry resources, check out the GoBox course summary page.
4. Code: Find Your Threshold
Before you can code, you need to connect to your GoPiGo. You can complete this Mission without Advanced Bloxter.
In order to create a robot that responds to light in the environment, we need to learn a little bit about how the light sensor itself perceives the environment.
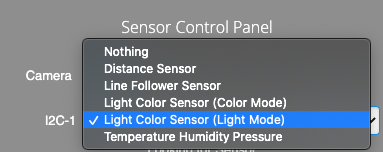 First, we need to find out what the light level is where you are now. Using the drop down menu on the right side of the page, select the port your sensor is attached to (I2C-1 or I2C-2), and choose "Light Color Sensor (Light Mode)".
First, we need to find out what the light level is where you are now. Using the drop down menu on the right side of the page, select the port your sensor is attached to (I2C-1 or I2C-2), and choose "Light Color Sensor (Light Mode)".
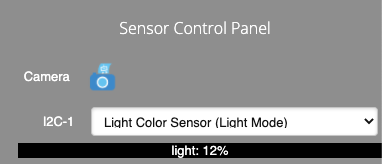
Below the dropdown will be the current light sensor reading. Try covering the sensor on your robot with your hand and you’ll see that this is a live-stream of the sensor data.
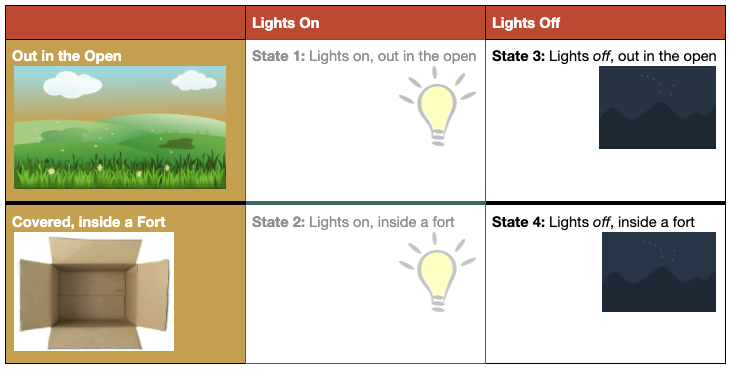
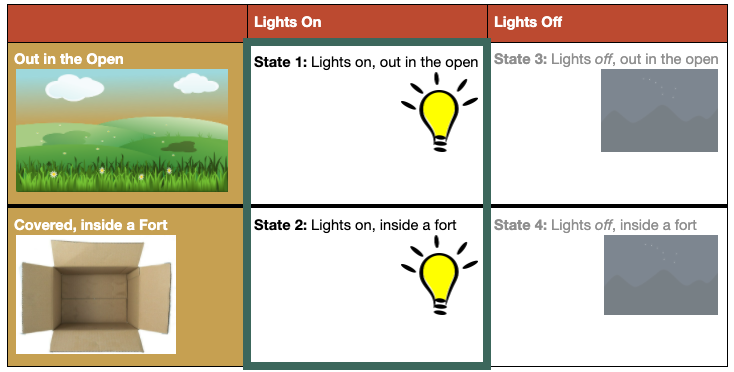
Now write down the numbers you see when the robot is in each of these states.