Build a Self Driving Car With the GoPiGo3
1. Instructions
Set the Robot Up
Our first step to turn the GoPiGo3 into a Self Driving robot is to set up the robot. You should have already assembled the GoPiGo3.
To get the robot fully set up for this project, we will need to take two more steps.
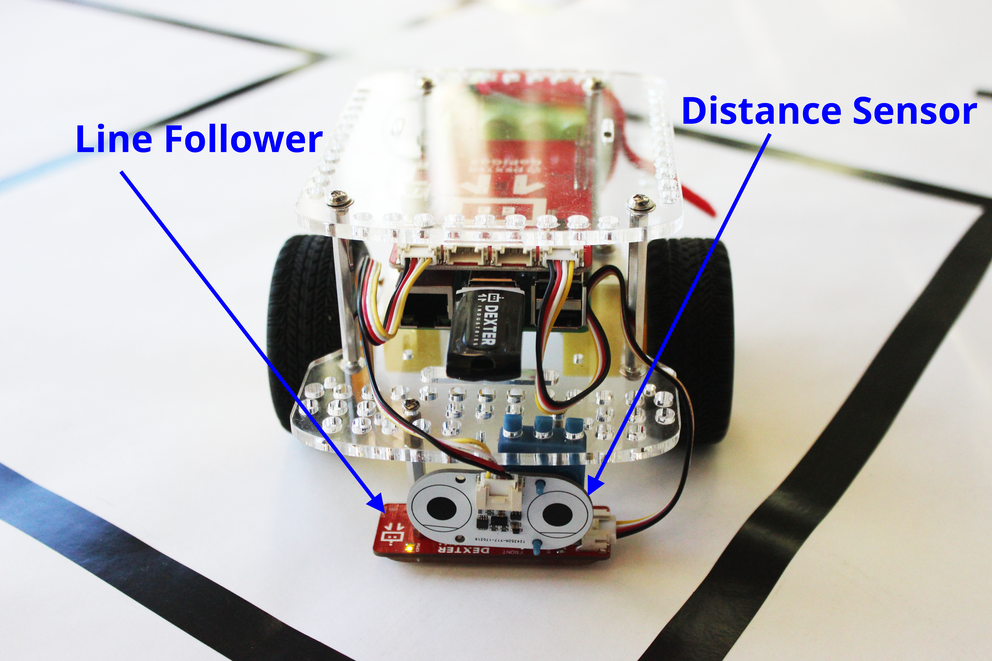
- First, assemble and attach the Line Follower to the GoPiGo3. Connect the sensor to either of the ports labeled "I2C" on the red GoPiGo3 board.
- Next, attach the Distance Sensor to the GoPiGo3. Connect the Distance Sensor to the other port labeled "I2C" on the red GoPiGo3 board.
In our picture, we've mounted the distance sensor to the GoPiGo3 using the plastic Sensor Mount. We keep the distance sensor low, so that it can detect any obstacles ahead of it!