Build a Self Driving Car With the GoPiGo3
3. Test Out an Intersection
Let's measure out our intersection. We will need to measure the distance between the line follower and the center of the wheel.
When our self-driving car approaches the intersection, it will approach until the line follower reads all black. If it turns immediately to the left or the right, it won't be able to find the line after the turn. What we'll do is add some programming in to help it take a turn and find the line again.
We want to be able to tell the robot to do the following:
- Drive forward along the line until the line follower reads all black.
- Drive forward a set distance until the center of the wheels are on the line intersecting the line our GoPiGo is following.
- Turn left or right.
- Follow the line.
In this step, we are going to measure the set distance in step 2.
In the picture you can see that the distance from the edge of the line to the wheel is about 6 cm.
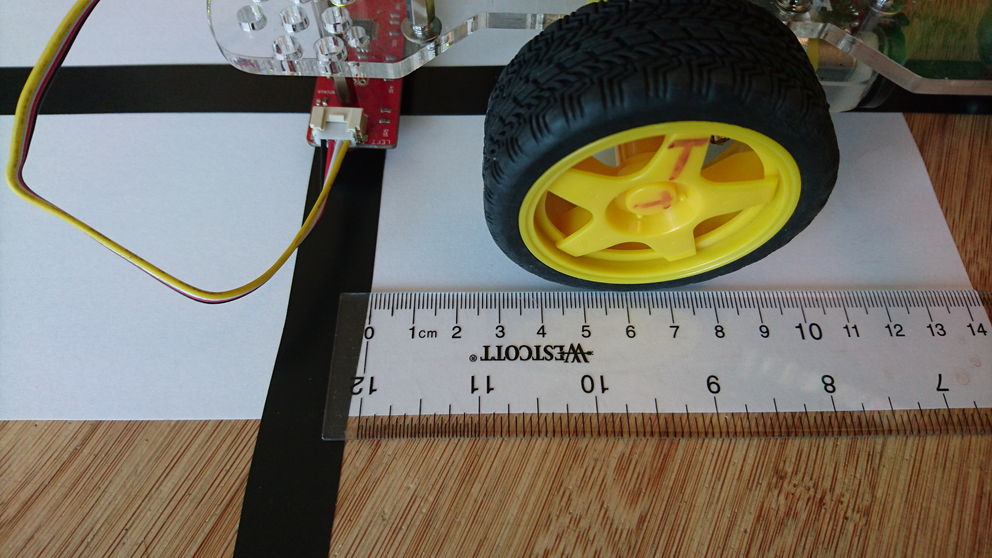
Make your own measurement, and write it down.