Worm Brain Simulator
Simulate a worm brain with the GoPiGo or GoPiGo3 and a Raspberry Pi.
9. Pi Robot With Worm Brain - GoPiGo3
This step is for the GoPiGo3 only. For the GoPiGo2, refer to preceding step.
Step 1: Build the GoPiGo3. We have step by step instructions on building the GoPiGo3.
Step 2: Attach the distance sensor and connect it to one of the I2C ports.
Step 3 Raspbian for Robots: You may need to update your GoPiGo3 library.
- Look for
/home/pi/GoPiGo3/Projects/Connectome - If it is present you do not need to update your library.
- If it is not present then you need to refresh by doing one of the following:
- Connect your GoPiGo3 to the Internet.
- on Raspbian for Robots click the DI Update icon on the desktop as per the image. Click on Update Dexter Software to refresh everything. This method is the best but it takes time. You will need to reboot your robot.
- for a faster approach, you can open a terminal window and type
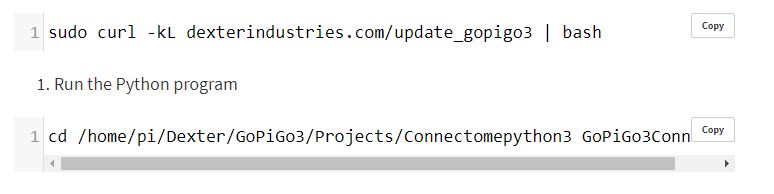
When the program is run, your GoPiGo will start to behave like a worm. Now with a worms brain, it will start moving around and looking for food!
Step 3 DexterOS:
- Right-click this link and save the notebook file to your laptop/computer.
- Connect to your GoPiGo and go into `Code with Python`
- Click the Upload button as shown in the image below.
- Upload the file from your laptop to the GoPiGo.
- Run the whole notebook.
NOTE:
This version has been enhanced a little compared to the original GoPiGo2 code . When looking for food, the two eyes on the GoPiGo3 will turn blue. When an obstacle is detected, they will turn red.

