Mission Instructions
Your mission is to create a robot that can explore remote, narrow canyons. First, you will create a sample canyon system with both a left and right turn. Then you will design, test, and refine your robot until it can navigate the canyon system independently.
10. Test: Canyon Explorer
When you’re ready, move your GoPiGo to just outside the canyon system you created, and then press Start.
As always, you might need to adjust your code a few times before your robot becomes an expert explorer, but we all need to start somewhere.
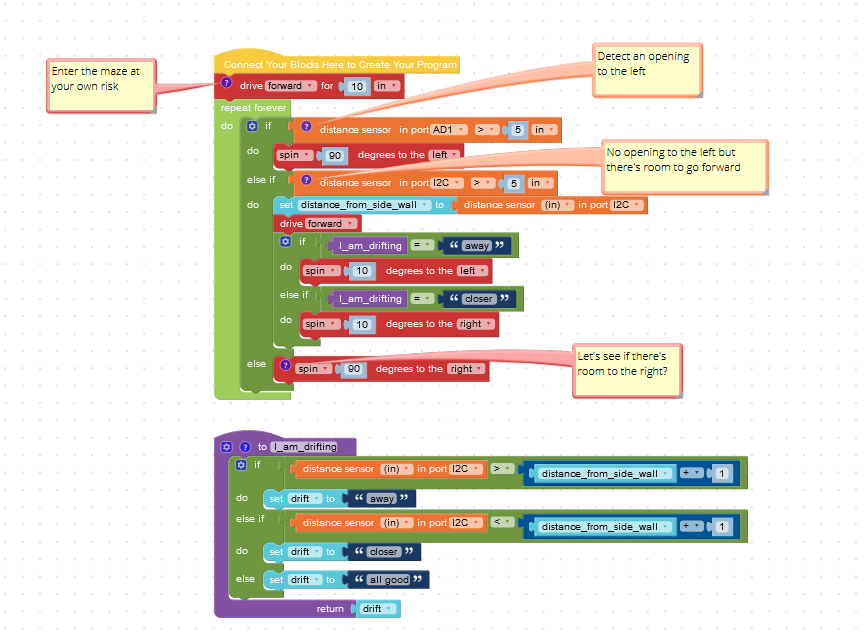
This is what our code ended up looking like - yours might be a little different and that is perfectly fine! One of the great parts of coding is how many different solutions can lead to successful robots!
Iterate
As you test your code, you might find some things that confuse you - that’s ok and it’s perfectly normal! Try renaming some functions to help the program make more sense with what you’re seeing.
You could also try changing the order of some parts of your program. Does that help your robot or slow it down?
If you’re seeing a behavior that puzzles you, simplify your canyon system. You can start the robot just before the spot where the issue happens. This gives you control over exactly where (and how) the robot starts a specific task. Now you don’t have to worry about whether the robot was drifting before it reached the obstacle! (And you don’t have to wait for the robot to keep exploring all the canyons that it already does well.)