Rescuer Learn 2: Installing the Distance Sensors
This is the third challenge within the Robotics with GoPiGo and Python Curriculum.
Your task is to design a robot program that can navigate through the maze-like jungle without trampling over any plants or getting stuck in any dead ends.
Learn how to use the Distance Sensor and practice using the left-hand rule of maze-solving.
1. Build: Connect the Two Distance Sensors
In this challenge two distance sensors are used, one to look left and another to look ahead.
- Let’s attach these onto the chassis using sensor mounts and plug them into the controller board using the cables provided.
- You will use the I2C port for the left-facing sensor
- You will use the Analog Digital 1 port for the front-facing sensor.
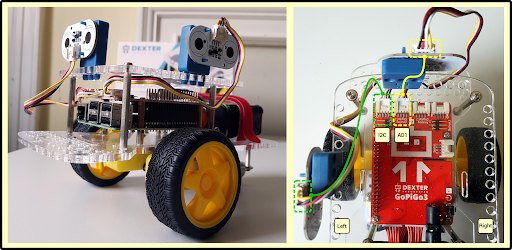
It doesn’t matter which way up the sensor is, as long as the mount is vertical and the sensor is facing away from the robot.
For best results, it is recommended mounting the side facing sensor above the wheel but you can experiment with mounting it further forward or back if you like.