Orienteering Project
This is the first challenge within the Robotics with GoPiGo and Python Curriculum.
Your task is to program your robot to navigate an area of previously unseen terrain to reach its destination, passing through a number of waypoints.
4. Write a Set of Orienteering Directions
Write a set of directions that your robot orienteer can follow. Consider the following:
- where will it start
- where will it finish
- what direction will be your North*?
- how will it travel from one waypoint to the next
- what landmarks will it pass along the way
*for the sake of this exercise, your North does not have to correspond to the actual True North.
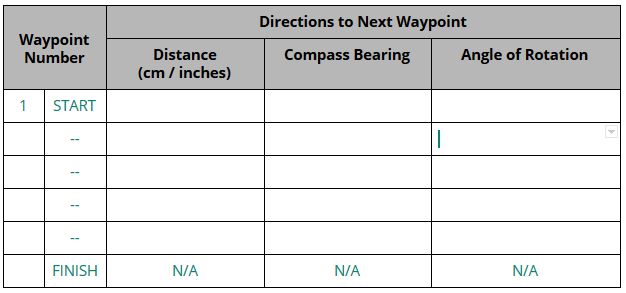
For each waypoint in your map fill in a row of the table below:
- measure straight line distance between your waypoints and enter this distance in the Distance column of the table below.
- choose a direction on your map to be your North. Using your cardboard compass, measure the compass bearings relative to your North of the following waypoint and enter it in the Compass Bearing column of the table below.
- calculate the angle of rotation necessary to point your robot orienteer at the next waypoint (clockwise > 0, anti-clockwise < 0) and enter it in the Angle of Rotation column of the table below.
Can you figure out how to calculate the angle of rotation? There are two ways this can be done. One of them requires some math, the other doesn’t. Do you know what they are?