Orienteering Project
This is the first challenge within the Robotics with GoPiGo and Python Curriculum.
Your task is to program your robot to navigate an area of previously unseen terrain to reach its destination, passing through a number of waypoints.
2. Make Your Map
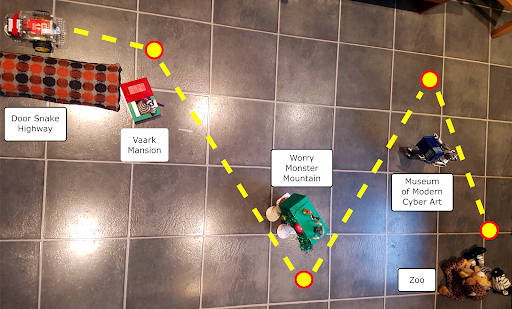
Make a physical map for the robot orienteer to navigate its way around by placing the objects that represent your landmarks on the floor.
MAP SIZE: An ideal floor area for your map is 2.5m x 2.5m or 10 feet x 10 feet. We don’t recommend you go much smaller than that but you can go bigger if you have space.
LANDMARKS: Place your landmarks on the floor in such a way that the robot orienteer can plot a route around them all.
WAYPOINTS: Decide on the location of your waypoints near each landmark. Mark these with a post-it note or a coin.
If necessary, adjust the positions of your landmarks and waypoints until you have a clear line of sight from each waypoint to the next, with sufficient space either side for your robot orienteer to drive through.